About Me
我是曼彻斯特大学的一名研究生,专业为机器人。我拥有扎实的机器人学基础和丰富的项目经验。我的研究兴趣主要集中在机器学习以及机器人自动化方面。通过参与多个学术项目和动手实践,我掌握了机器人系统设计、编程和数据分析方面的综合技能。此外,我熟悉学习 Python、ROS2 等编程语言和Gazebo、MuJoCo等开发平台,并具备团队合作和独立解决复杂问题的能力。我希望能发挥自己在相关领域的技术专长,为公司的创新项目贡献自己的力量。
University Project
Leo Rover自动避障识别抓取机器人设计
该项目旨在开发一种能够识别和抓取物体的自主机器人。作为团队的一员,我负责为机器人机械手编程,使其能够准确地从指定位置拾取物体,并将其运送到指定的目标箱中。我的工作重点是运动规划、控制,以及确保精确高效地操作物体。
DOBC控制器设计
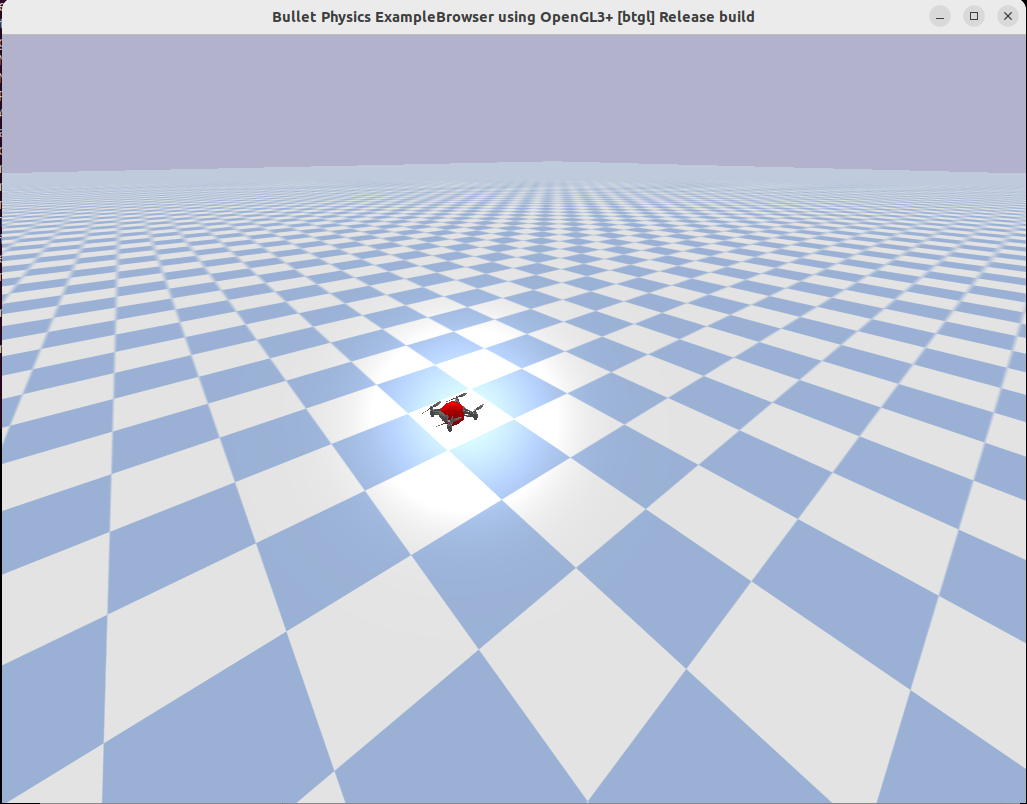
我设计的基于扰动观测器的控制(DOBC)控制器通过使用观测器重建扰动并相应调整控制输入,来估计和补偿影响无人机的外部扰动。这增强了无人飞行器的鲁棒性,使其能够在不确定因素或外力作用下准确跟踪所需的位置。
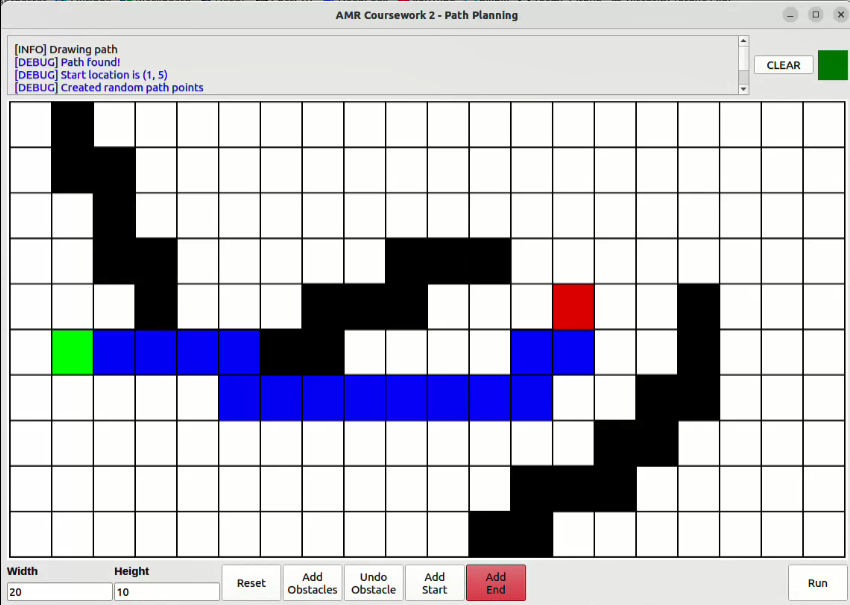
A* 算法
该算法实现了 A* 搜索,在避开障碍物的同时,有效地找到了起点和目标之间的最短路径
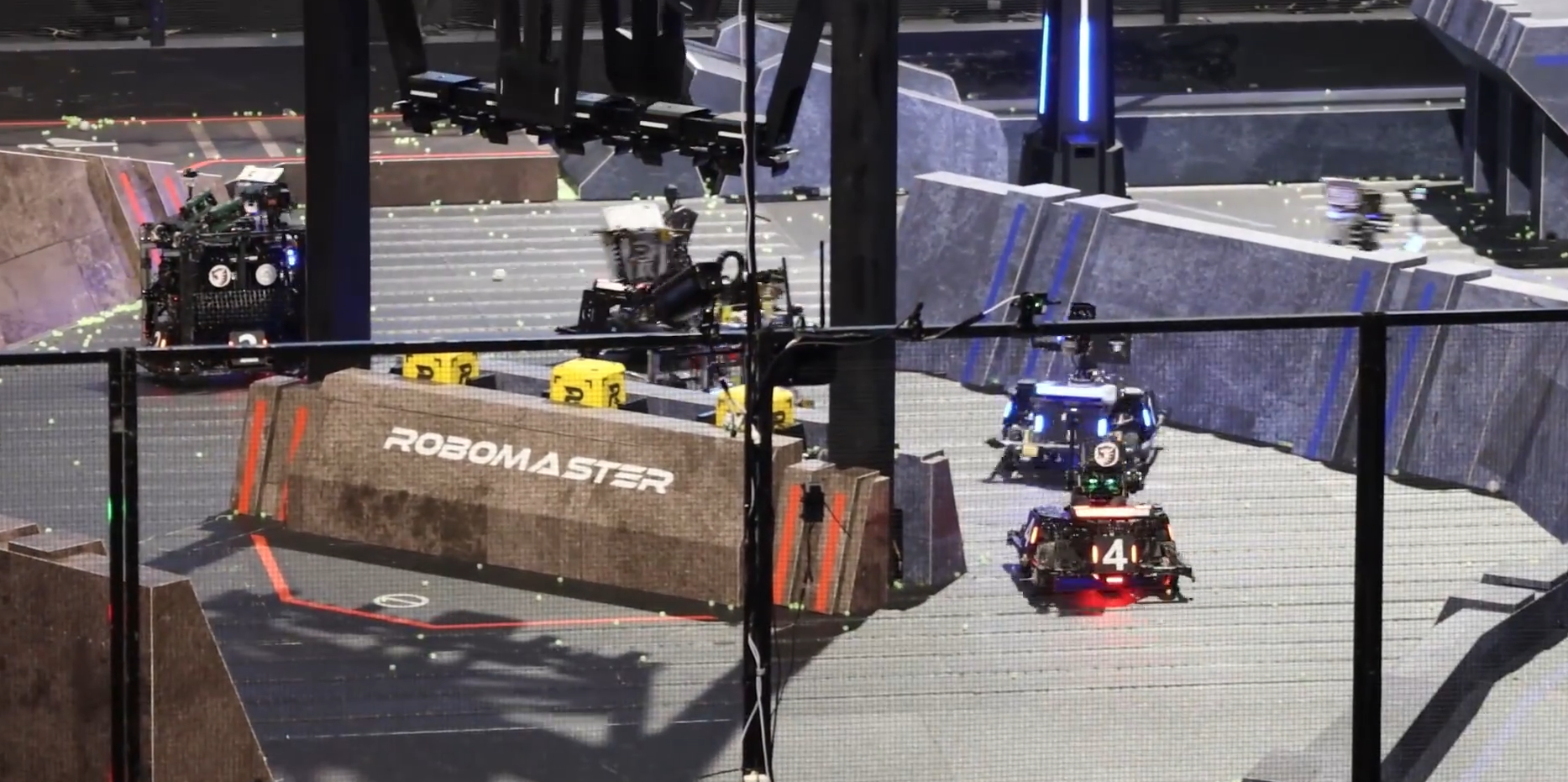
RoboMaster
通过收集和研究相关案例,制定系统设计方案 与团队成员合作编写机器人子弹发射程序 完成了电压转换模块的电路板设计 调试机器人的PID参数,使其命中率超过80% 应用速度环和角度环等负反馈控制方法编写控制程序 执行硬件和软件集成、验证和持续工程工作

电子元件管理系统设计
该系统开发的工作包括需求分析、数据表设计、功能设计和实施。其中,功能的设计和实现是关键工作。系统开发采用了前端和后端分离技术,前端使用 Vue.js 技术完成页面设计,后端使用 Spring Spring 技术完成页面设计。完成页面设计,后端使用 Springboot 整合 Maven 实现前后端数据接口。并集成 MybatisPlus 来实现读写 MySQL 数据库。可实现组件管理的基本功能,包括采购、入库、请购等,应用场景广泛。
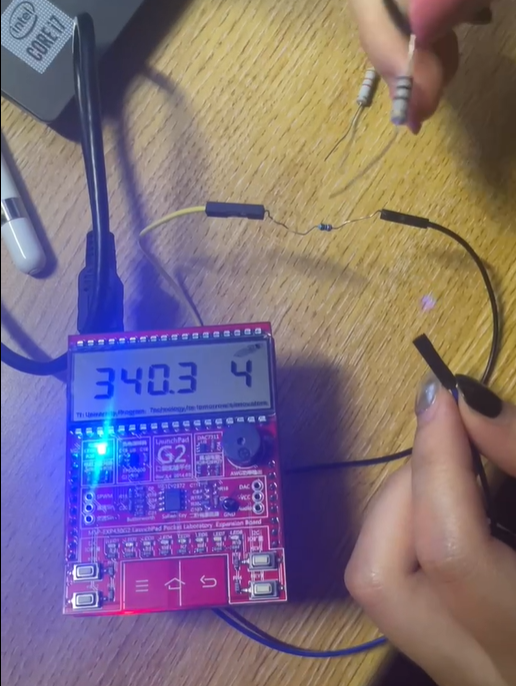
数字电阻表设计
这种嵌入式设计可实现五十欧姆至五千欧姆电阻的精确测量,并将其显示在液晶屏上。
VIDEOS

可持续发展机器人系统
关于机器人系统对应对可持续发展挑战的贡献及其伦理观点的教育视频。
RPLIDAR A2M12 Lidar特性
这段视频通过一系列实验分析了激光雷达的特性,展示了激光雷达在不同场景下的性能和主要特征。
SKILLS